
平成29~30年度 筋細胞を駆動源とする
マッスルバイク創成のための要素技術開発 補助事業
秋山研究室では,生体の細胞を機械部品と融合させることで,新しいシステムの創出を目指しています.例えば,モーターの代わりに生物の筋肉を取り込むことで,電気や化石燃料を必要とせず,生体の持つ自己修復機能を備えたバイオハイブリッドロボットが可能になります.本助成では,筋細胞にて駆動する小さなバイクのための要素技術開発として,骨格筋細胞から筋組織を再構築(骨格筋ゲル)し,その収縮運動を回転運動へと変換する機構の開発を行いました.
1.骨格筋ゲル培養法の確立
骨格筋ゲルは,テフロン製のモールドに,骨格筋細胞を含むコラーゲンゲルを流し込み培養することで,リング形状の骨格筋ゲルアクチュエータを構築した.骨格筋細胞には,マウス骨格筋芽細胞株C2C12もしくはラット骨格筋より酵素処理で得られた初代培養細胞を用いた.培養3週間後のリング状の骨格筋ゲルの様子を図1aに示す.このときの骨格筋ゲルの内径は約8mmであった.また,この骨格筋ゲルをシリコンゴム製のピラー2本に取り付け,電気刺激を行うことで,収縮能をもっていることを確認した(図1b).
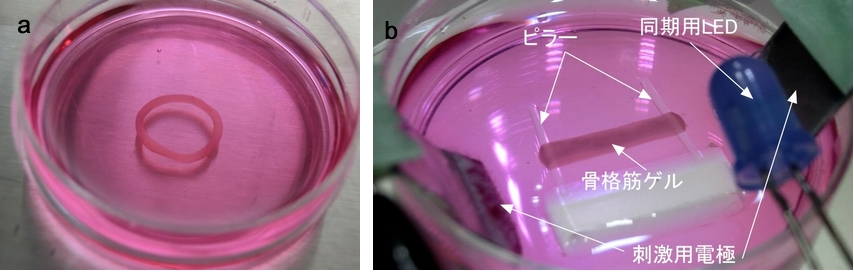
図1 骨格筋ゲル (a)テフロンモールドから取り外した骨格筋ゲル,(b)電気刺激の様子.
2.電気刺激自動培養装置の開発
十分な収縮能を骨格筋ゲルの培養には,培養液の交換および電気刺激が必要となるため,これらを自動で行う装置を開発した.その概要と培養の様子を図2に示す.本装置は,電気刺激部と培地交換部から成る.骨格筋ゲルは,6ウェルプレート内に設置したテフロンモールドにて培養される.この6つのテフロンモールドそれぞれに,培地交換システムからのチューブが接続されており,1日または2日おきに全量の培地が交換される.電気刺激部では,LabVIEWによるプログラムよりDAQデバイスからバイポーラパルス波形され,バイポーラ電源により増幅される.この増幅されたバイポーラパルスは,各モールド内に設置された1ペアの白金電極より骨格筋ゲルに印加される.この装置にて,2~3週間培養することで,収縮能を持った骨格筋ゲルを得ることができた.
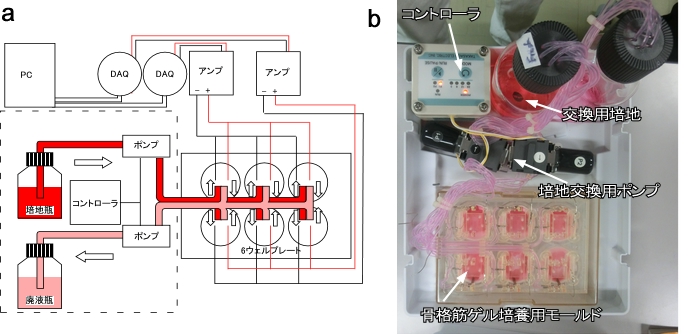
図2 自動培養装置 (a)システムの概要図,(b)培養装置の写真.
3.直線-回転変換機構の開発
最終的に採用した変換機構の概要を図3abに示す.外枠(青)に筋細胞ゲルを4つ取り付け,この筋細胞ゲルの位相をずらし順に収縮させることにより,四角形を描くように動かす.その結果,枠の内側の円と五角形の構造体(赤)の頂点が触れた部分で摩擦が発生し,五角形の部品が少し回転する.これを連続で行うことで,五角形の構造体が回転させる.この変換機構を,3Dプリンタで作製し,その動作を簡易的に確認した(図3c).外枠を四角形の軌跡を反時計回りに移動させると,五角形の構造体は,時計回りに回転した.また,外枠を,時計回りに移動させると,五角形の構造体は,反時計回りに回転した.以上より,筋細胞ゲルの収縮の順序を変えることで,回転方向を決定できることが分かった.また併せて,この機構を駆動するためには,4つの骨格筋ゲルを順に刺激する必要があるため,位相をずらして各筋細胞ゲルを電気刺激するためのシステムも,自動培養装置の電気刺激部を再プログラムすることで開発した.
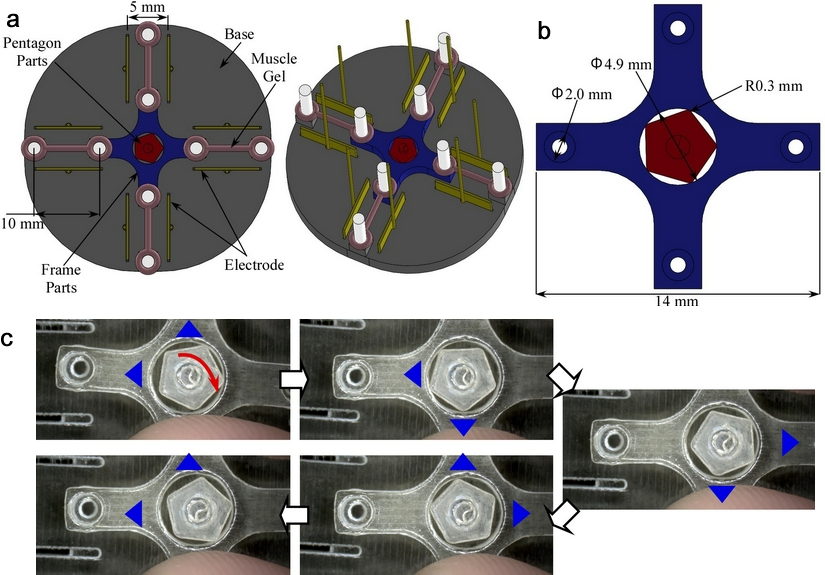
図3 直線-回転変換機構 (a)概要図 (b)中心部拡大図 (c) 機構の動作確認の様子.